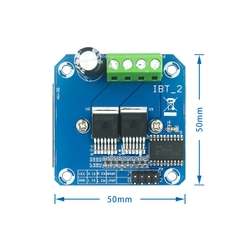



BTS7960 là một mô-dun điều khiển động cơ DC, cầu H dòng cao tích hợp đầy đủ cho các ứng dụng truyền động động cơ cần sử dụng dòng cao.
Mạch này chứa một MOSFET bên cao kênh p và một MOSFET bên thấp kênh n, với một vi mạch trình điều khiển tích hợp trong một gói. Việc giao tiếp với vi điều khiển được thực hiện dễ dàng nhờ vi mạch điều khiển tích hợp có các đầu vào mức logic, bảo vệ chống quá nhiệt, quá áp, quá dòng và ngắn mạch...
Thông số kỹ thuật:
Sơ đồ chân:
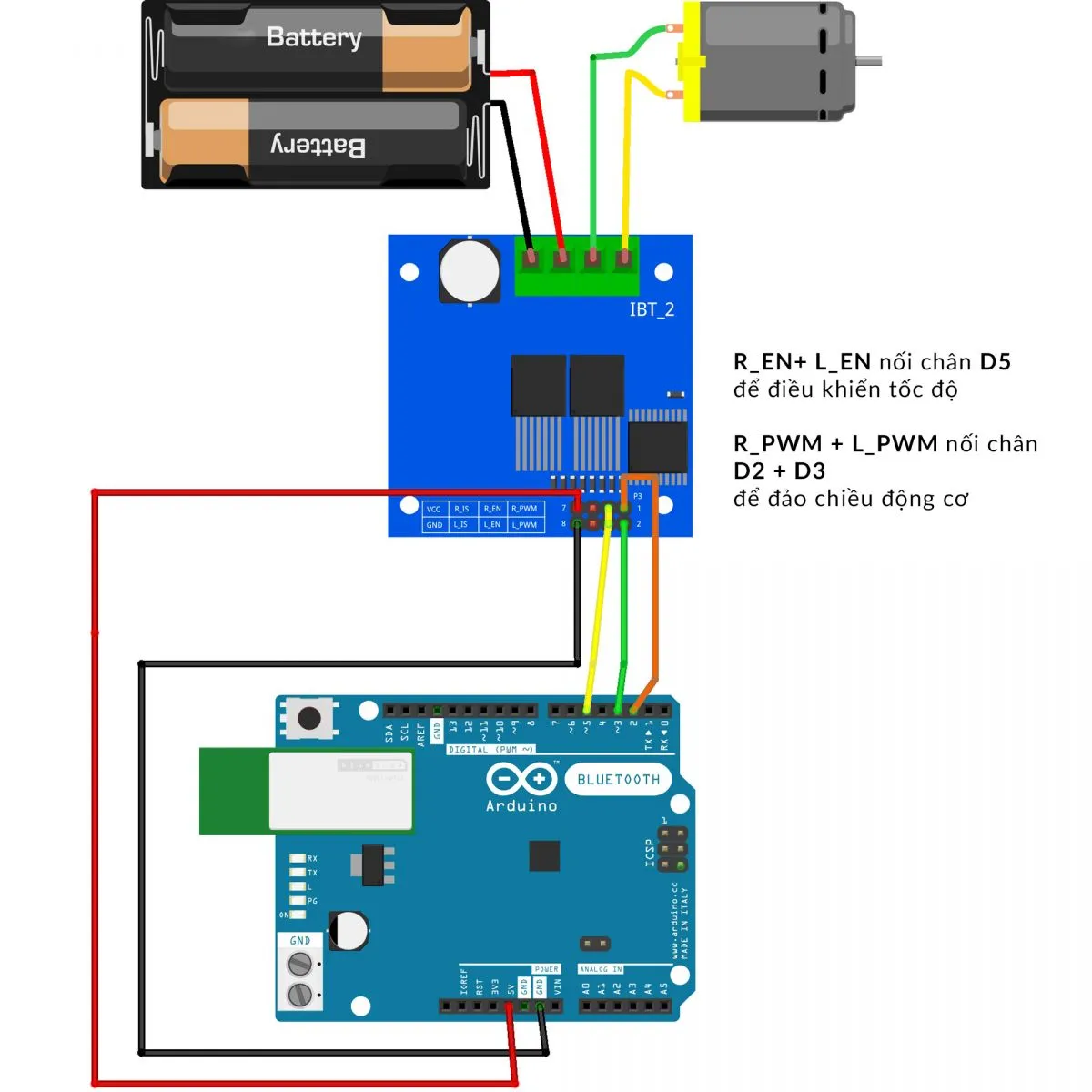
Với ứng dụng bình thường RPWM,LPWM nối với GPIO (VD : chân digital 2,3) để điều khiển chiều quay của động cơ.
Chân R_EN , L_EN nối chung lại rồi nối với PWM (VD chân digital 5) để điều khiển tốc độ động cơ.
Code tham khảo Arduino:
int RL_EN = 5; // băm xung
int R_PWM = 2;// điều khiển chiều quay
int L_PWM = 3;// điều khiển chiều quay
void setup() {
pinMode(RL_EN, OUTPUT);
pinMode(R_PWM, OUTPUT);
pinMode(L_PWM, OUTPUT);
digitalWrite(R_PWM, HIGH);
digitalWrite(L_PWM, HIGH); //STOP
}
void loop() {
int i;
digitalWrite(R_PWM, HIGH);
digitalWrite(L_PWM, LOW); //clockwise
for(i = 0; i <= 255; i= i+10) //Speed up
{
analogWrite(RL_EN, i);
delay(500);
}
for(i = 255; i >= 0; i= i-10)//Speed down
{
analogWrite(RL_EN, i);
delay(500);
}
delay(1500); //breaks
digitalWrite(R_PWM, LOW);
digitalWrite(L_PWM, HIGH); //counter-clockwise
for(i = 0; i <= 255; i= i+10) //Speed up
{
analogWrite(RL_EN, i);
delay(500);
}
for(i = 255; i >= 0; i= i-10) //Speed down
{
analogWrite(RL_EN, i);
delay(500);
}
}
Video tham khảo:
1. BẢO HÀNH
Bảo hành sản phẩm là: khắc phục những lỗi hỏng hóc, sự cố kỹ thuật xảy ra do lỗi của nhà sản xuất.
1.1. Quy định về bảo hành
– Sản phẩm được bảo hành miễn phí nếu sản phẩm đó còn thời hạn bảo hành được tính kể từ ngày giao hàng, sản phẩm được bảo hành trong thời hạn bảo hành ghi trên Sổ bảo hành, Tem bảo hành và theo quy định của từng hãng sản xuất liên quan đến tất cả các sự cố về mặt kỹ thuật.
– Có Phiếu bảo hành và Tem bảo hành của công ty hoặc nhà phân phối, hãng trên sản phẩm. Trường hợp sản phẩm không có số serial ghi trên Phiếu bảo hành thì phải có Tem bảo hành của CÔNG TY DOLA (kể cả Tem bảo hành gốc).
1.2. Những trường hợp không được bảo hành
– Sản phẩm đã hết thời hạn bảo hành hoặc mất Phiếu bảo hành.
– Số mã vạch, số serial trên sản phẩm không xác định được hoặc sai so với Phiếu bảo hành.
– Tự ý tháo dỡ, sửa chữa bởi các cá nhân hoặc kỹ thuật viên không phải là nhân viên CÔNG TY DOLA
– Sản phẩm bị cháy nổ hay hỏng hóc do tác động cơ học, biến dạng, rơi, vỡ, va đập, bị xước, bị hỏng do ẩm ướt, hoen rỉ, chảy nước, động vật xâm nhập vào, thiên tai, hỏa hoạn, sử dụng sai điện áp quy định.
– Phiếu bảo hành, Tem bảo hành bị rách, không còn Tem bảo hành, Tem bảo hành dán đè, hoặc Tem bảo hành bị sửa đổi (kể cả Tem bảo hành gốc).
– Trường hợp sản phẩm của Quý khách hàng dán Tem bảo hành của CÔNG TY DOLA hay nhầm lẫn thông tin trên Phiếu bảo hành, Phiếu mua hàng: Trong trường hợp này, bộ phận bảo hành sẽ đối chiếu với số phiếu xuất gốc lưu tại Công ty, hóa đơn, phần mềm của Công ty hay thông tin của nhà phân phối, hãng, các Quý khách hàng khác mua cùng sản phẩm cùng thời điểm, nếu có sự sai lệch thì sản phẩm của Quý khách không được bảo hành (có thể Tem bảo hành của Công ty bị thất thoát và bị lợi dụng dán lên thiết bị hay nhầm lẫn nhỏ khi nhập, in ra). Kính mong Quý khách hàng thông cảm!
– Bảo hành không bao gồm vận chuyển hàng và giao hàng.
2. BẢO TRÌ
Bảo trì, bảo dưỡng: bao gồm lau chùi sản phẩm, sửa chữa những hỏng hóc nhỏ có thể sửa được (không bao gồm thay thế thiết bị). Thời gian bảo trì, bảo dưỡng tùy thuộc vào sự thỏa thuận giữa DOLA và Quý khách hàng.