Cảm biến gia tốc GY-291 ADXL345 là một máy đo gia tốc 3 trục nhỏ, mỏng, công suất thấp với độ phân giải cao (13 bit) đo lên đến ± 16g. Dữ liệu đầu ra kỹ thuật số được định dạng dưới dạng bổ sung 16 bit hai chiều và có thể truy cập thông qua giao diện kỹ thuật số SPI (3 hoặc 4 dây) hoặc I2C.
Cảm biến gia tốc này rất phù hợp cho các ứng dụng thiết bị di động. Nó đo gia tốc tĩnh của trọng lực trong các ứng dụng cảm biến độ nghiêng, cũng như gia tốc động do chuyển động hoặc sốc. Độ phân giải cao của nó (4 mg/LSB) cho phép đo các thay đổi độ nghiêng dưới 1,0°.
Thông số kỹ thuật Cảm biến gia tốc GY-291 ADXL345:
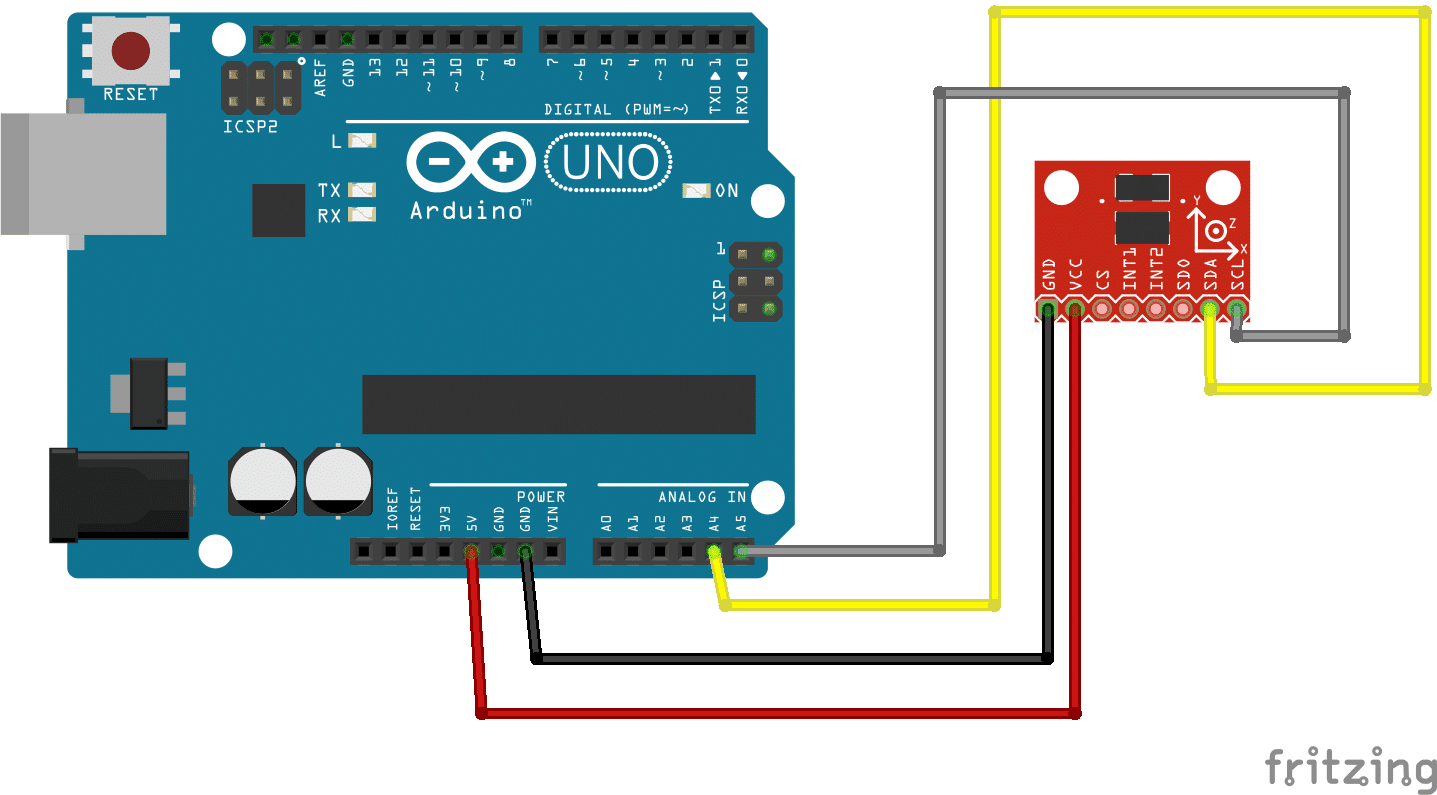
Sơ đồ chân:
Code tham khảo Arduino:
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_ADXL345_U.h>
/* Assign a unique ID to this sensor at the same time */
Adafruit_ADXL345_Unified accel = Adafruit_ADXL345_Unified(12345);
void displaySensorDetails(void)
{
sensor_t sensor;
accel.getSensor(&sensor);
Serial.println("------------------------------------");
Serial.print ("Sensor: "); Serial.println(sensor.name);
Serial.print ("Driver Ver: "); Serial.println(sensor.version);
Serial.print ("Unique ID: "); Serial.println(sensor.sensor_id);
Serial.print ("Max Value: "); Serial.print(sensor.max_value); Serial.println(" m/s^2");
Serial.print ("Min Value: "); Serial.print(sensor.min_value); Serial.println(" m/s^2");
Serial.print ("Resolution: "); Serial.print(sensor.resolution); Serial.println(" m/s^2");
Serial.println("------------------------------------");
Serial.println("");
delay(500);
}
void displayDataRate(void)
{
Serial.print ("Data Rate: ");
switch(accel.getDataRate())
{
case ADXL345_DATARATE_3200_HZ:
Serial.print ("3200 ");
break;
case ADXL345_DATARATE_1600_HZ:
Serial.print ("1600 ");
break;
case ADXL345_DATARATE_800_HZ:
Serial.print ("800 ");
break;
case ADXL345_DATARATE_400_HZ:
Serial.print ("400 ");
break;
case ADXL345_DATARATE_200_HZ:
Serial.print ("200 ");
break;
case ADXL345_DATARATE_100_HZ:
Serial.print ("100 ");
break;
case ADXL345_DATARATE_50_HZ:
Serial.print ("50 ");
break;
case ADXL345_DATARATE_25_HZ:
Serial.print ("25 ");
break;
case ADXL345_DATARATE_12_5_HZ:
Serial.print ("12.5 ");
break;
case ADXL345_DATARATE_6_25HZ:
Serial.print ("6.25 ");
break;
case ADXL345_DATARATE_3_13_HZ:
Serial.print ("3.13 ");
break;
case ADXL345_DATARATE_1_56_HZ:
Serial.print ("1.56 ");
break;
case ADXL345_DATARATE_0_78_HZ:
Serial.print ("0.78 ");
break;
case ADXL345_DATARATE_0_39_HZ:
Serial.print ("0.39 ");
break;
case ADXL345_DATARATE_0_20_HZ:
Serial.print ("0.20 ");
break;
case ADXL345_DATARATE_0_10_HZ:
Serial.print ("0.10 ");
break;
default:
Serial.print ("???? ");
break;
}
Serial.println(" Hz");
}
void displayRange(void)
{
Serial.print ("Range: +/- ");
switch(accel.getRange())
{
case ADXL345_RANGE_16_G:
Serial.print ("16 ");
break;
case ADXL345_RANGE_8_G:
Serial.print ("8 ");
break;
case ADXL345_RANGE_4_G:
Serial.print ("4 ");
break;
case ADXL345_RANGE_2_G:
Serial.print ("2 ");
break;
default:
Serial.print ("?? ");
break;
}
Serial.println(" g");
}
void setup(void)
{
Serial.begin(9600);
Serial.println("Accelerometer Test"); Serial.println("");
/* Initialise the sensor */
if(!accel.begin())
{
/* There was a problem detecting the ADXL345 ... check your connections */
Serial.println("Ooops, no ADXL345 detected ... Check your wiring!");
while(1);
}
/* Set the range to whatever is appropriate for your project */
accel.setRange(ADXL345_RANGE_16_G);
// displaySetRange(ADXL345_RANGE_8_G);
// displaySetRange(ADXL345_RANGE_4_G);
// displaySetRange(ADXL345_RANGE_2_G);
/* Display some basic information on this sensor */
displaySensorDetails();
/* Display additional settings (outside the scope of sensor_t) */
displayDataRate();
displayRange();
Serial.println("");
}
void loop(void)
{
/* Get a new sensor event */
sensors_event_t event;
accel.getEvent(&event);
/* Display the results (acceleration is measured in m/s^2) */
Serial.print("X: "); Serial.print(event.acceleration.x); Serial.print(" ");
Serial.print("Y: "); Serial.print(event.acceleration.y); Serial.print(" ");
Serial.print("Z: "); Serial.print(event.acceleration.z); Serial.print(" ");Serial.println("m/s^2 ");
delay(500);
}
1. BẢO HÀNH
Bảo hành sản phẩm là: khắc phục những lỗi hỏng hóc, sự cố kỹ thuật xảy ra do lỗi của nhà sản xuất.
1.1. Quy định về bảo hành
– Sản phẩm được bảo hành miễn phí nếu sản phẩm đó còn thời hạn bảo hành được tính kể từ ngày giao hàng, sản phẩm được bảo hành trong thời hạn bảo hành ghi trên Sổ bảo hành, Tem bảo hành và theo quy định của từng hãng sản xuất liên quan đến tất cả các sự cố về mặt kỹ thuật.
– Có Phiếu bảo hành và Tem bảo hành của công ty hoặc nhà phân phối, hãng trên sản phẩm. Trường hợp sản phẩm không có số serial ghi trên Phiếu bảo hành thì phải có Tem bảo hành của CÔNG TY DOLA (kể cả Tem bảo hành gốc).
1.2. Những trường hợp không được bảo hành
– Sản phẩm đã hết thời hạn bảo hành hoặc mất Phiếu bảo hành.
– Số mã vạch, số serial trên sản phẩm không xác định được hoặc sai so với Phiếu bảo hành.
– Tự ý tháo dỡ, sửa chữa bởi các cá nhân hoặc kỹ thuật viên không phải là nhân viên CÔNG TY DOLA
– Sản phẩm bị cháy nổ hay hỏng hóc do tác động cơ học, biến dạng, rơi, vỡ, va đập, bị xước, bị hỏng do ẩm ướt, hoen rỉ, chảy nước, động vật xâm nhập vào, thiên tai, hỏa hoạn, sử dụng sai điện áp quy định.
– Phiếu bảo hành, Tem bảo hành bị rách, không còn Tem bảo hành, Tem bảo hành dán đè, hoặc Tem bảo hành bị sửa đổi (kể cả Tem bảo hành gốc).
– Trường hợp sản phẩm của Quý khách hàng dán Tem bảo hành của CÔNG TY DOLA hay nhầm lẫn thông tin trên Phiếu bảo hành, Phiếu mua hàng: Trong trường hợp này, bộ phận bảo hành sẽ đối chiếu với số phiếu xuất gốc lưu tại Công ty, hóa đơn, phần mềm của Công ty hay thông tin của nhà phân phối, hãng, các Quý khách hàng khác mua cùng sản phẩm cùng thời điểm, nếu có sự sai lệch thì sản phẩm của Quý khách không được bảo hành (có thể Tem bảo hành của Công ty bị thất thoát và bị lợi dụng dán lên thiết bị hay nhầm lẫn nhỏ khi nhập, in ra). Kính mong Quý khách hàng thông cảm!
– Bảo hành không bao gồm vận chuyển hàng và giao hàng.
2. BẢO TRÌ
Bảo trì, bảo dưỡng: bao gồm lau chùi sản phẩm, sửa chữa những hỏng hóc nhỏ có thể sửa được (không bao gồm thay thế thiết bị). Thời gian bảo trì, bảo dưỡng tùy thuộc vào sự thỏa thuận giữa DOLA và Quý khách hàng.